隐马尔可夫模型(Hidden Markov Models-HMMs)
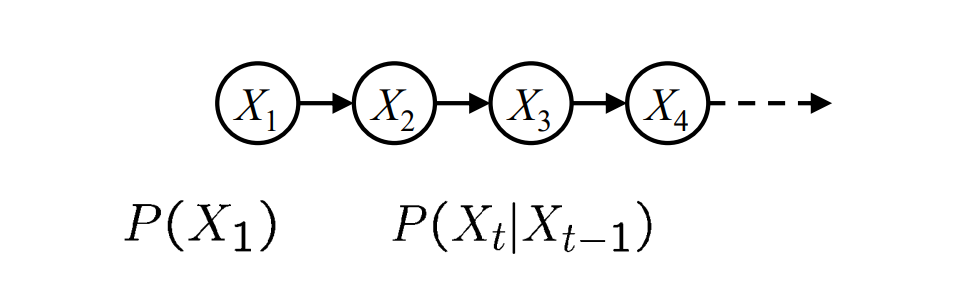
马尔可夫模型(Markov Models-MMs)
- 引入了时间(或空间)的概念
- 属性:
- 状态(State):在时间\(t\)时\(X\)的值\(X_t\)
- 参数(Parameters):状态转移的概率
- 稳定性假设(Stationary assumption):在任意时间,转台转移函数总是相同的
- 与MDP相比,没有行动(Action)的选择
- 条件独立性:
- \(Past\perp\!\!\!\perp Future | Present\)
- 每一个时间步只取决于前一个状态(一阶马尔可夫性)
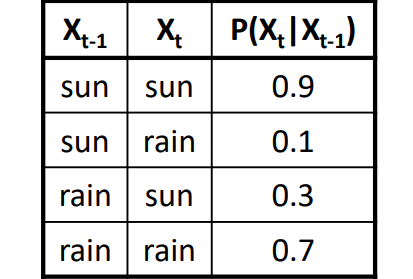
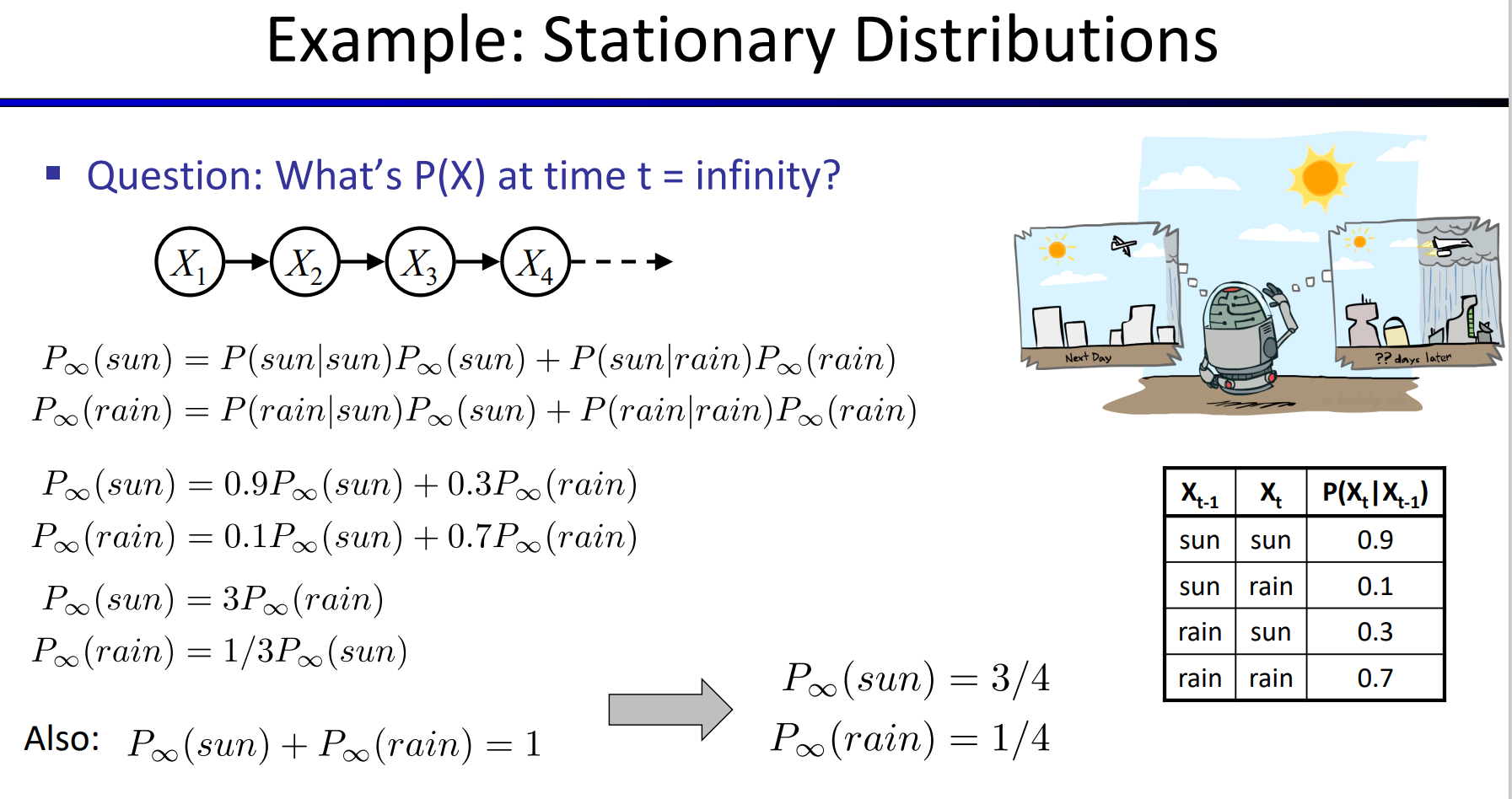
- 案例:
- 初始化分布:
- sun:1.0
- rain:0.0
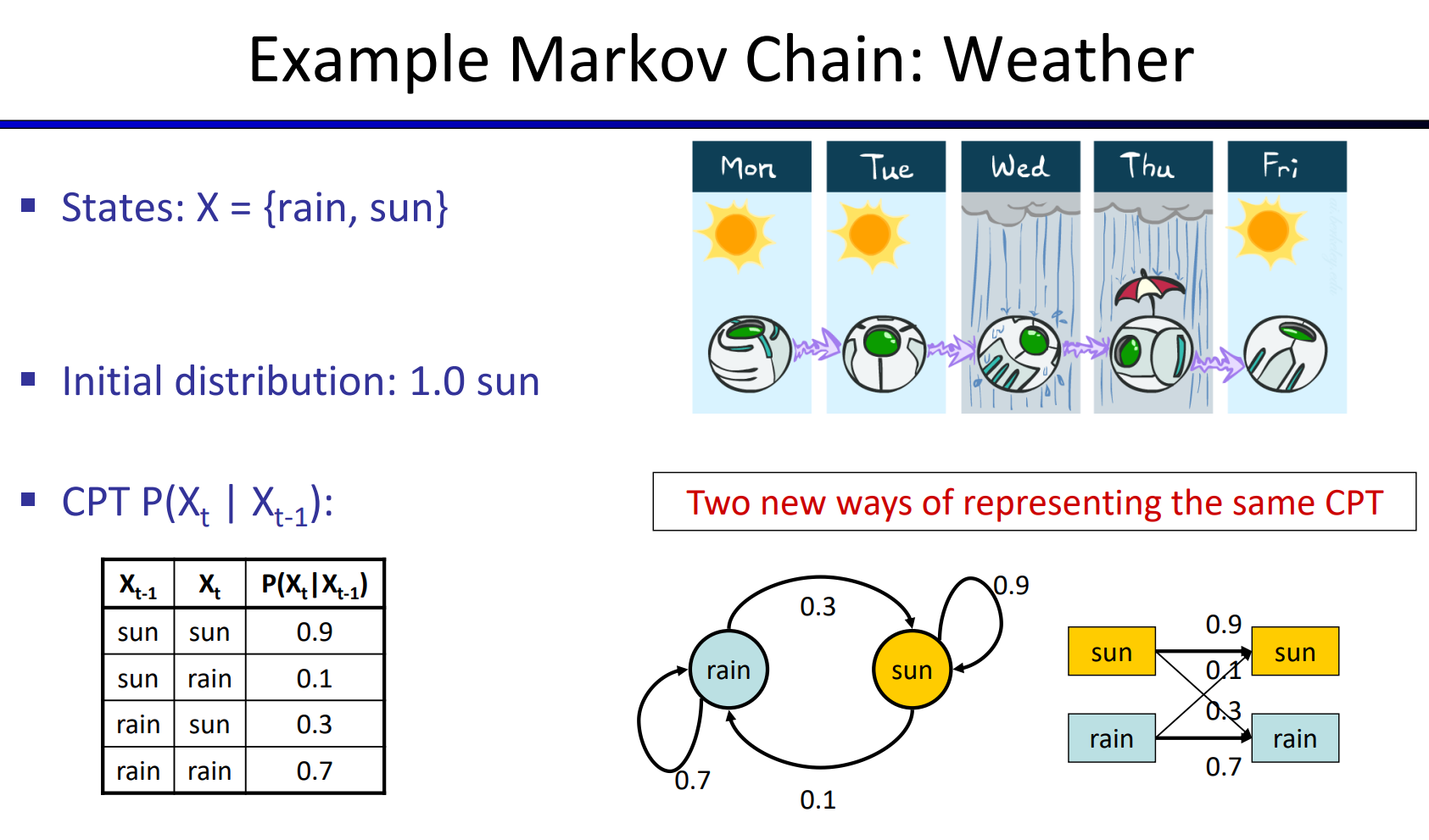
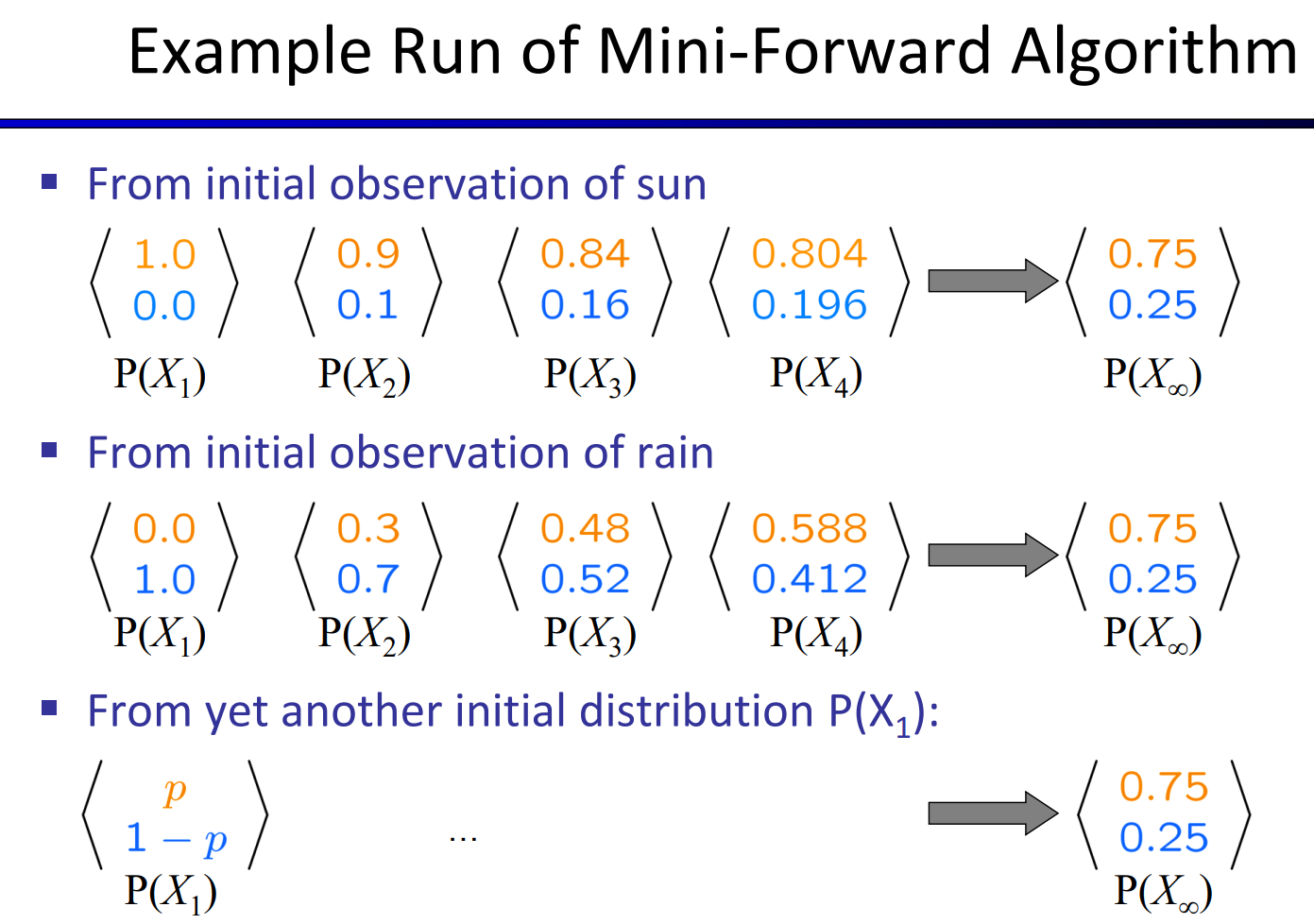
- 下一步的计算\(P(X_2=sun)=P(X_2=sun|X_1=sun)P(X_1=sun)+P(X_2=sun|X_1=rain)P(X_1=rain)=0.9·1.0+0.1·0.0=0.9\) \(P(X_2=rain)=P(X_2=rain|X_1=sun)P(X_1=sun)+P(X_2=rain|X_1=rain)P(X_1=rain)=0.1·1+0.7·0.0=0.1\)
- 初始化分布:
- Mini-Forward Algorithm:\(P(x_t)=\sum_{w_i}Pr(w_i,W_{i+1})=\sum_{x_t-1}P(x_t|x_{t-1})P(x_{t-1})\)
- 逐渐收敛至正确的值
- 逐渐收敛至正确的值
- Staionary Distribution:
- 对于大多数的马尔可夫链,初始状态的影响会越来越小,并且最终状态与初始状态无关,满足\(P_\infty(X)=P_{\infty+1}(X)=\sum_xP(X|x)P_\infty(x)\)
- 对于大多数的马尔可夫链,初始状态的影响会越来越小,并且最终状态与初始状态无关,满足\(P_\infty(X)=P_{\infty+1}(X)=\sum_xP(X|x)P_\infty(x)\)
隐马尔可夫模型(Hidden Markov Models-HMMs)
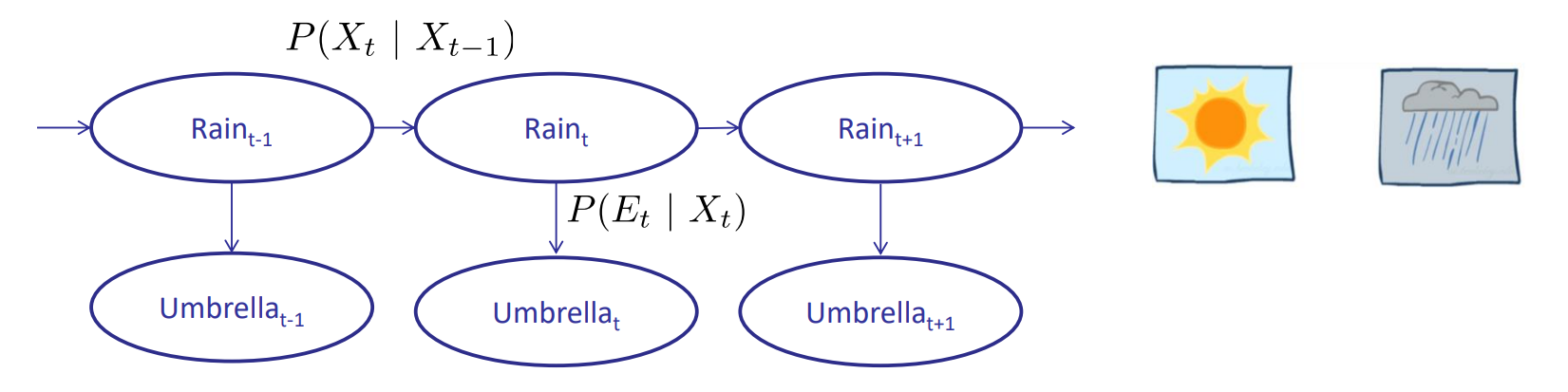
- 隐马尔可夫模型:
- 状态X上的基础马尔可夫链
- 每一个时间步仅能观察到输出(影响)
- 包含:
- 初始分布\(P(X_1)\)
- 状态转移\(P(X_t|X_{t-1})\)
- 与马尔可夫模型一样,是稳定的
- 影响\(P(E_t|X_t)\)
- 稳定的
- 条件独立性:
- 马尔可夫性:未来只取决于现在
- 观测的结果只取决于当前的状态
- 不同时间步获得的观测结果(evidence)之间并非独立<-之间由隐含的状态相关联
- 应用:
- 语音识别
- 翻译
- 机器人追踪
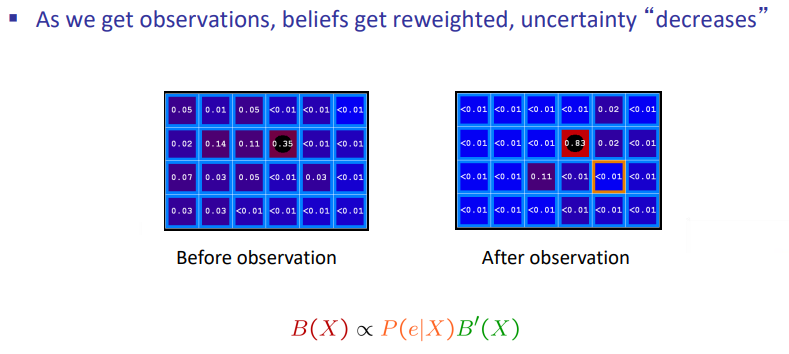
- Belief Distribution
- time i with all evidence \(f_1,f_2,...,f_i\):\(B(W_i)=Pr(W_i|f_1,f_2,...,f_i)=Pr(W_i|f_{1:i})\)
- time i with all evidence \(f_1,f_2,...,f_{i-1}\):\(B^\prime(W_i)=Pr(W_i|f_1,f_2,...,f_{i-1})=Pr(W_i|f_{1:i-1})\)
前向算法(The Forward Algorithm)
-
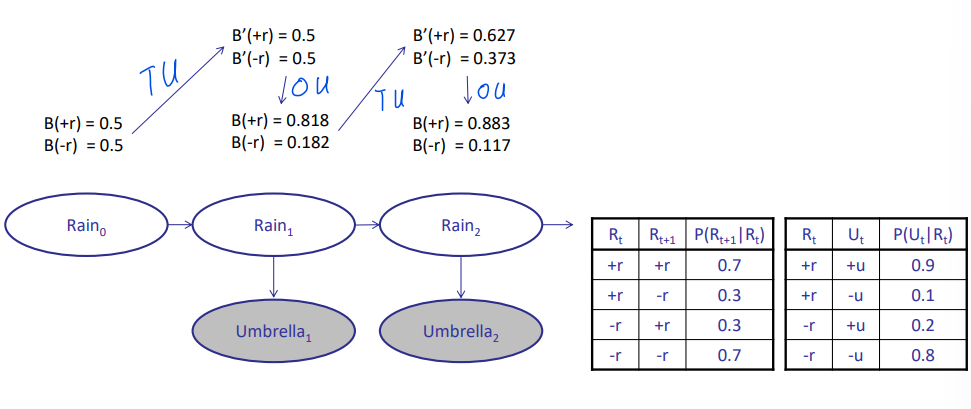
Time Elapse Update(由\(B(W_i)\)确定\(B^\prime(W_{i+1})\))
- 关键:时间步
- 推导:
- \(B(W_i)\)与\(B(W_{i+1})\)的关系(方法:mini-forward algorithm)\(\(B^\prime(W_{i+1})=Pr(W_{i+1}|f_{1:i})=\sum_{w_i}Pr(W_{i+1}|w_i,f_{1:i})Pr(w_i|f_{1:i})\)\)
- \(B(W_i)=Pr(W_i|f_1,f_2,...,f_i)=Pr(W_i|f_{1:i})\) && \(W_{i+1}\perp\!\!\!\perp f_{1:i}|W_i\):\(\(B^\prime(W_{i+1})=\sum_{w_i}Pr(W_{i+1}|w_i)B(w_i)\)\)
- 案例:

-
Observation Update(由\(B^\prime(W_{i+1})\)确定\(B(W_{i+1})\))
- 关键:观察evidence前后
- 推导:
- \(B(W_{i+1})\)(方法:朴素贝叶斯)\(\(B(W_{i+1})=Pr(W_{i+1}|f_{1:i+1})=\frac{Pr(W_{i+1},f_{i+1}|f_{1:i})}{Pr(f_{i+1}|f_{1:i})}\)\)
- 对于任意的\(B(W_{i+1})\),\(Pr(f_{i+1}|f_{1:i})\)为常数\(\(B(W_{i+1})\propto Pr(W_{i+1},f_{i+1}|f_{1:i})\)\)
- 链式法则:\(\(B(W_{i+1})\propto Pr(W_{i+1},f_{i+1}|f_{1:i})=Pr(f_{i+1}|W_{i+1},f_{1:i})Pr(W_{i+1}|f_{1:i})\)\)
- \(B^\prime(W_i)=Pr(W_i|f_1,f_2,...,f_{i-1})=Pr(W_i|f_{1:i-1})\) \(\(B(W_{i+1})\propto Pr(f_{i+1}|W_{i+1})B^\prime(W_{i+1})\)\)
- 根据前向算法:\(\(B(W_{i+1})\propto Pr(f_{i+1}|W_{i+1})\sum_{w_i}Pr(W_{i+1}|w_i)B(w_i)\)\)
- 案例:
- 结合:
应用:粒子滤波(Particle Filtering)
- 滤波(Filtering):近似的解决方法
- 粒子(Particle):即样本的另一种称呼
- 精确推理存在的缺陷:
- 状态数量过多而难以存储B(X)
- 解决方法:近似推理(Approximate Inference)
- 存储粒子而非状态,并且存储大量的粒子,每一个粒子代表一个状态
- \(n\ll d\)
- n:the number of particles
- d:the number of possible states
- 使用\(P(x)\)近似的代表值为x的粒子数,即\(B(x)\)完全取决于状态x上粒子的数量
粒子滤波模拟(Particle Filtering Simulation)
- 初始化方法:
- 任意初始化
- 统一初始化
- 根据初始化概率进行初始化
- 两个更新方法:
- Time Elapse Update
- 根据状态转移模型进行更新\(Pr(T_{i+1}|t_i)\)
- Observation Update
- 使用感知模型\(Pr(F_i|T_i)\)来评估粒子
- 过程:
- 计算所有粒子的权重
- 计算总权重
- \(total\ weight = 0\):则重新进行初始化
- \(total\ weight \ne 0\):归一化并且再取样
- Time Elapse Update
- 重复计算,直到分布收敛