Actor-Critic算法
在之前的内容中,我们学习了基于值函数的方法和基于策略的方法,其中基于值函数的方法只学习一个价值函数,而基于策略的方法只学习一个策略函数。那么一个很自然的问题,有没有什么方法及学习价值函数,又学习策略函数呢?那就是Actor-Critic算法。 Actor-Critic是一系列算法,目前前沿的许多高效算法都是属于Actor-Critic。 Actor-Critic算法本质上是基于策略的算法,因为这系列算法都是去优化一个餐参数的策略,只是其中会额外学习价值函数来帮助策略函数的学习。
Actor-Critic算法
- 通过拟合一个值函数来指导策略进行学习(Critic)
在REINFORCE中,使用的蒙特卡洛采样方法对梯度的估计是无偏的,但是方差非常大,我们需要引入其他因子来减小方差
- 梯度的表达形式:$$
g=\mathbb{E}\left[\sum_{t=0}^{\infty} \psi_t \nabla_\theta \log \pi_\theta\left(a_t \mid s_t\right)\right]
$$
- 其中\(\psi_t\)可以有很多种形式:
- \(\sum_{t^{\prime}=0}^{\infty} \gamma^t r_{t^{\prime}}\):轨迹的总回报
- \(\sum_{t^{\prime}=t}^{\infty} \gamma^{t^{\prime}-t} r_{t^{\prime}}\):动作\(a_t\)之后的回报
- \(\sum^{\infty}_{t^\prime=t} r_{t^{\prime}}-b\left(s_t\right)\):基准线版本的改进
- 通过引入基线\(b(s_t)\)来减小方差
- \(Q^{\pi_\theta}\left(s_t, a_t\right)\):动作价值函数
- 估计一个动作价值函数来代替蒙特卡洛采样得到的回报
- \(A^{\pi_\theta}\left(s_t, a_t\right)\):优势函数
- \(r_t+\gamma V^{\pi_\theta}\left(s_{t+1}\right)-V^{\pi \theta}\left(s_t\right)\):时序差分残差
- 由\(Q=r+\gamma V\quad A=Q-V\)进一步得到
- 其中\(\psi_t\)可以有很多种形式:
- Actor-Critic的方法可以在每一步之后都进行更新
- Actor-Critic:
- Critic:通过Actor与环境交互手机的数据学习一个价值函数,这个价值函数会用于帮助Actor进行策略更新
- 使用时序差分的方法进行学习,损失函数为:(\(\mathcal{L}(\omega) = \frac{1}{2} (r + \gamma V_\omega(s_{t+1}) - V_\omega(s_t))^2\)\)
- 其中,\(r + \gamma V_\omega(s_{t+1}) - V_\omega(s_t)\)为时序差分目标
- 价值函数的梯度:\(\(\nabla_\omega \mathcal{L}(\omega) = - (r + \gamma V_\omega(s_{t+1}) - V_\omega(s_t)) \nabla_\omega V_\omega(s_t)\)\)
- 使用时序差分的方法进行学习,损失函数为:(\(\mathcal{L}(\omega) = \frac{1}{2} (r + \gamma V_\omega(s_{t+1}) - V_\omega(s_t))^2\)\)
- Actor:与环境交互,并利用价值函数来用策略梯度学习一个更好的策略
- Critic:通过Actor与环境交互手机的数据学习一个价值函数,这个价值函数会用于帮助Actor进行策略更新
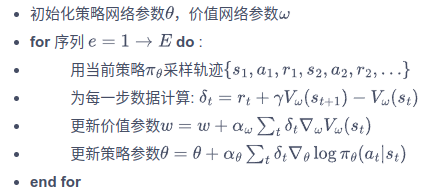
- 算法流程: