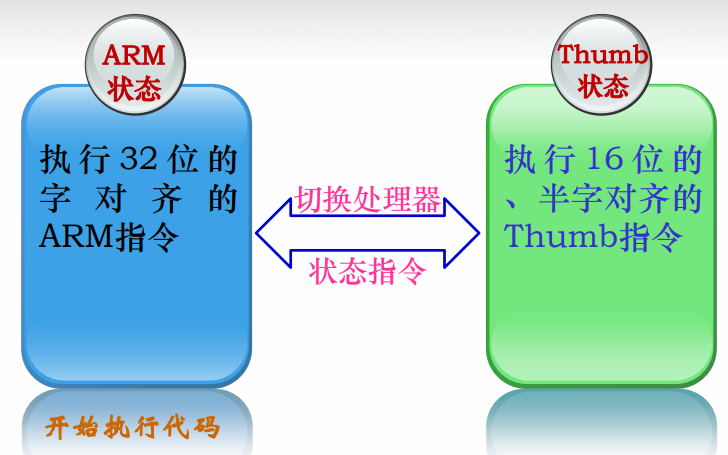
ARM微处理器工作状态
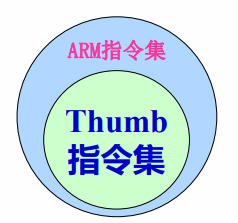
ARM指令集与Thumb指令集
- ARM指令集:
- 指令固定宽度32位,进行4字节对齐
- 在有限的存储空间中,存放的指令少,代码密度低
-
Thumb指令集
- 为了减少代码量而提出
- 仅支持一些通用功能,可理解为ARM指令压缩形式的子集
- 必要时仍然需要ARM指令集支持
-
区别:

-
切换方法:
- 当寄存器
Rm的状态为bit[0]=1时,通过执行BX Rm指令,从ARM->Thumb - 当寄存器
Rm的状态为bit[0]=0时,通过执行BX Rm指令,从Thumb->ARM// ARM->Thumb CODE32 LDR R0, =Label + 1 BX R0 CODE16 Label MOV R1, #12 // Thumb -> ARM CODE16 LDR R0, =Label BX R0 CODE32 Label MOV R1, #10由于在ARM中,每一条指令的长度都是4字节(ARM)或2字节(Thumb),并且由于对齐的存在,在执行跳转指令时,最后一位,即
bit[0]均为0,则使用这一位作为标志位,进行转态切换,并且,这样的行为不会影响到跳转目标的位置。
- 当寄存器